

- 锅炉除氧器系列
- 新型旋膜改进型除氧器
- 真空除氧器
- 电化学真空三位一体除氧器
- 除氧器溢流水封装置
- 低位真空除氧器
- 大气式除氧器
- 解析除氧器
- 旋膜式除氧器
- 热力除氧器
- 三位一体真空电化学除氧器
- 全自动解析除氧器
- 旋膜式除氧器改造
- 胶球清洗系列
- 冷凝器在线清洗装置
- 凝汽器胶球清洗系统
- 收球网-胶球清洗配件
- 装球室-胶球清洗配件
- 胶球泵-胶球清洗配件
- 二次滤网-胶球清洗配件
- 胶球清洗装置
- 凝汽器清洗胶球分类
- 凝汽器循环水二次滤网
- 加药装置系列
- 磷酸盐加药装置
- 智能加药装置|全自动加药装置
- 循环水加药装置
- 炉水加磷酸盐装置
- 工业滤水器系列
- 手动旋转反冲洗滤水器
- 全自动反冲洗滤水器
- 全自动自清洗过滤器
- 精密激光打孔滤水器
- 手动滤水器
- 电动滤水器
- 全自动滤水器
- 工业滤水器
- 快开盲板过滤器
- 真空滤油机系列
- 透平油真空滤油机
- 多功能真空滤油机
- 真空滤油机应用
- 高精度精密滤油机
- 锅炉消音器系列
- 柴油发电机消音器
- 锅炉风机消音器
- 锅炉消音器
- 蒸汽消音器
- 排汽消音器
- 吹管消音器
- 管道消音器
- 风机消音器
- 小孔消音器
- 安全阀消音器
- 柴油机消音器
- 真空泵消音器
- 汽轮机消音器
- 锅炉管道吹管消音器
- 锅炉蒸汽消音器几种形式
- 其它节能减排设备
- 汽液两相流液位控制器|疏水器
- 煤粉取样器|锅炉自动取样器
- 蒸汽回收装置
- 射水抽气器(多通道、单通道)
- 列管式冷油器
- 飞灰取样器
- 煤粉取样器
- 锅炉取样冷却器
- 汽液两相流疏水器
- 旋流式飞灰等速取样器


大型火力发电厂真空除氧器钢轨式拖拉就位工艺研究
阐述了大型火力发电厂真空除氧器钢轨式拖拉就位施工技术,对传统的真空除氧器就位工艺进行了优化设计,经核校计算确定各结构部件满足强度要求,优化后的就位技术具有工艺先进,施工作业量少,工序简单、经济、安全可靠等特点,大大提升了设备安装效率,具有广泛应用价值。
大型火力发电厂建设过程中,真空除氧器为满足使用功能要求,其体积与重量随着机组容量的提升而不断增大。如何保证真空除氧器快速、高效、安全的就位成为了摆在每个施工单位面前的难题,各种各样的方法层出不穷,但效果都不尽如人意。福建三期2×660MW工程4号机组主体建筑及安装T程在真空除氧器拖运就位的过程中,选择了创新性的钢轨式拖拉就位方式,即通过将除氧层局部构架缓装、直接在除氧层楼板上铺设由道木轨枕及钢轨组成的拖运轨道,再将真空除氧器吊装、拖运到位。
1拖运就位工艺
本真空除氧器拖拉就位工艺主要原理是在直接除氧层楼板上铺设枕木和钢轨,并利用斜撑固定钢轨后,让真空除氧器在钢轨上滑动,以达到拖运真空除氧器的目的。在此过程中,钢轨的铺设为本工艺的的重要作业程序,其施工技术要求比较高。
2真空除氧器拖运装置设计及就位
2.1真空除氧器拖运装置设计及安装本方案设计真空除氧器(真空除氧器净重1150kN)拖运系统为钢轨、枕木、卷扬组成的拖拉系统,钢轨型号为50kg/m、枕木规格为2500mm(L)×200mm(形)×150mm(日)、卷扬机规格为5t。在真空除氧器底座底面预先用槽钢14点焊固定,在除氧层上铺设枕木,主要布置如下:
2.1.1钢轨、枕木设计及布置
在除氧层沿真空除氧器就位中心线铺设枕木,枕木排列间隔应小于150mm,在尽可能地靠近或接近两根楼板建筑梁正上方水平、直线铺设及固定两列50kg/m钢轨作为真空除氧器的拖运梁,中心间距1.6m,从除氧层固定端(或扩建端)一直铺设到除氧层就位基础上方,每隔3m用16号槽钢连接焊接加固钢轨,防止拖运过程中轨枕移动或偏移。另外,还需在钢轨上方涂上黄油,减少拖拉阻力,拖运轨道俯视图(参考图1-图2)。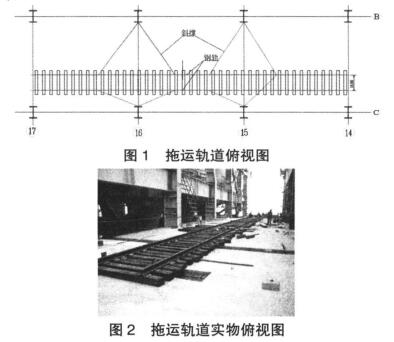
2.1.2真空除氧器托座临时支墩设计
由于真空除氧器就位时,需要顶升离开拖运钢轨,必须临时设计四个能承载1000kN支承点(参考图3)。由千斤顶和枕木交替操作,把真空除氧器顶升到基础正上方,并把枕木逐层支承牢固,真空除氧器顶升高度以其底座高于就位基础200mm为宜。下页图4为托座临时支墩梁实物侧视图。
2.1.3真空除氧器牵引方式设计(分两阶段)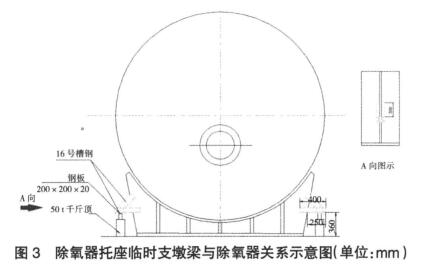
真空除氧器的拖运分为两个阶段,真空除氧器由地面通过CC2500(450t)履带吊单机吊至除氧层已铺设好的拖运轨道上。因此,真空除氧器的牵引方式也分两个阶段:
1)一阶段:布置卷扬机+滑轮组的的牵引方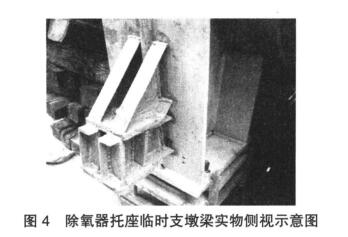
式,卷扬机钢丝绳采用“三三走六”的形式布置(参考图5与图6)。在此阶段中,缓慢起吊真空除氧器,当真空除氧器起升高度超过除氧层500mm时,停止起升。使用溜绳缓慢将真空除氧器转至与就位方向相一致,在移动的过程中应始终使真空除氧器与就位时中心轴线相平行。当真空除氧器的后支座进入除氧层时,缓慢松放真空除氧器至拖运枕木拖运轨道上。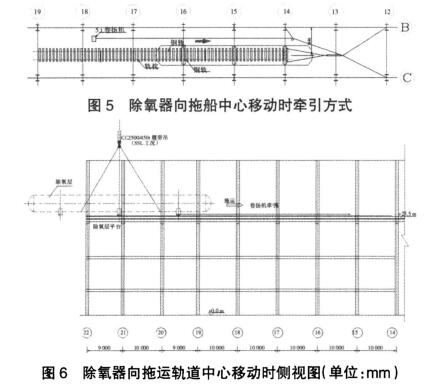
2)二阶段:将真空除氧器与卷扬机拖拉系统连接好,并使拖拉系统受力,开动卷扬机拖拉系统,把真空除氧器往就位位置方向拖运,拖运时,需在钢轨表面上涂上锂基润滑脂,以减少滑动摩擦。卷扬机继续拖运真空除氧器,使真空除氧器的托座到达就位基础位置上方。拖运时,为了便于控制,防止拖运失控,保证真空除氧器缓慢匀速前进,采用2只5t手拉葫芦配合牵引。
2.2真空除氧器就位
真空除氧器整体拖运至基础位置上方,用4个1000kN千斤顶顶起真空除氧器,抽出拖运钢轨,在轨枕上安放钢板及移运器,可使设备前后及左右移动,再根据基础位置上纵横中心线,实现备调整后的精确就位,如图7所示。
3相关校核计算
3.1CC2500履带吊负荷分析与计算CC2500履带吊吊装工况选用超起塔式工况,主臂42m+副臂30m,120t车身配重,30t车体配重,140t超起配重,85。主臂倾角。27m回转半径时额定起重量分别为136t。真空除氧器筒体图纸给定质量为115t,作业幅度控制在27m以内,吊具重约10t,则cc2500履带吊负荷率为:K’=(115+10)/136=92%,满足安全要求。
3.2钢丝绳选用、校核
根据真空除氧器吊装图,只需对6×37+1―170一函66mm长16m的钢丝绳安全系数进行校核,该钢丝绳共四道受力,其夹角为60。,则每道钢丝绳受力为:115/(4cos30)=33.2t,查得钢丝绳破断拉力5。=267t,安全系数K=267/33.2=8(安全),满足安全要求。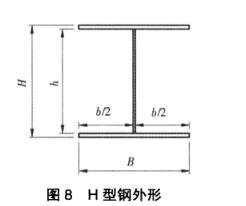
3.3牵引卷扬机选取计算
真空除氧器吊到除氧间26m层以后用卷扬机系统拖拉时是移运器在轨道上行走,取滑动磨擦综合系数厂-0.25,真空除氧器水箱质量Ⅳ计为115t,则卷扬机拖拉时所需牵引力止删=0.25×115=28.75t。在B排17轴处布置一台5t卷扬机,选用32t四门滑轮组一套,9道穿绕,滑轮组钢丝绳出头拉力计算公式为:5珊‘咎矿(1)式中:E为综合摩擦系数,取1.04;n为钢丝绳分支数,取9;后为转向轮个数,取1。将相关数据代人式(1)得:S=4t。滑轮组钢丝绳用中20mm,单道破断拉力为19.7t,则安全系数南=19.7/3.7=5.3,满足要求。卷扬机拖拉系统和水箱连接钢丝绳:用中32mm钢丝绳4道,每道受力止28.75/4=7.2t。查手册中32mm的钢丝绳破断拉力为65.4t,则安全系数南=65.4/7.2=9,满足要求。
3.4除氧层楼板钢次梁强度校核
根据轨道枕木布置图及除氧层钢次梁布置图,只需对钢梁HN700×300×13×24及钢梁HM588×300×12×20进行强度校核。H型钢外形如图8所示。
3.4.1HN700×300×13×24强度校核扩弯模量形=(B日3―6舻)/6Ⅳ=(300×7003―287×6523)/(6×700)=5.56×106mm3。设真空除氧器支墩与钢轨之间接触面为3个支承点,则对钢轨大压力尸=(115/2)×104N。钢梁的均布载荷为口=肌=57.5×104÷10000=57.5N/mm,其中£为钢梁的跨度。圭西乡渤M一=q£2/8=575×(104)2/8=7.19×108N・mrrb大弯曲应力盯=M一彤=7.19×108÷(5.56×106)=129N/mm2<[盯]=210N/mm2。故该钢梁强度满足要求。
3.4-2HM588×300×12×20强度校核扩弯模量形=(BⅣ3―6^3)/6H=(300×5883―288×5483)/(6×588)=3.85×106mm3。设真空除氧器支墩与钢轨之间接触面为3个支承点,则对钢轨大压力为辟(115/2)×104N。钾榭勺±轫锒封湔口=肌=575×104÷9000=639N/mm。大弯矩M?=q£2/8=63.9×(9×103)2/8=6.47×108N・mm。大弯曲应力盯=M一形=6.47×108÷(3.85×106)=168N/mm2<[盯]_210N/mm2。故该钢梁强度满足要求。
4关键工序总结
拖运轨道枕木铺设时,枕木排列间隔应小于150mm,钢轨间距为1600mm,拖运钢轨的纵向中心线必须与除氧层的水泥面楼板的支承梁相接近,确保轨枕和钢轨组合成的轨道有可靠的楼板支撑强度,这样就无需门制作拖运箱形梁,能够节省了]二程施工费用和工期,加快了后续的整个真空除氧器系统其它设备安装进度。真空除氧器支座应在地面安装焊接完毕,同时用槽钢14与底座底面点焊固定,有利于除氧水箱在钢轨表面滑动。无需业制作拖运钢架箱形梁,能降低拖运时真空除氧器的重心高度。
本施工工艺省去了传统的真空除氧器拖拉就位用的钢构箱形梁,省去了箱形梁的材料费、制作加工费,同步节省了组装、拆卸工序,减少了大量的人工投人,削除了安全隐患,缩短了施二周期,提高了工作效率,能节约较高的箱形梁材料和加工制作人工费等。通过在多台大中型火电机组:r程成功应用本工艺,能为类似设备就位工艺提供技术指标和实践经验,大大提升了工程施工技术水平,具有明显的社会效益和环境效益。